
Note: Some of the graphical elements of this site are only visible to browsers that support accepted web standards. The content of this site is, however, accessible to any browser or Internet device.
Control and Power Portfolio Partnership
Robust Model Predictive Control
Objective
The broad objective of this research is the development, analysis, assessment and exploitation of a new form of model predictive control (MPC), Feedback MPC that is inherently robust in the face of uncertainty. Main objective is to devise a method, the complexity of which is considersbly less than that of dynamic programming, for achieving feedback model predictive control of constrained dynamic systems that is robust to a wide class of uncertainties (unknown disturbances, model error and state estimation error when output feedback is used).
What is model predictive control?
Model Predictive Control is an approach to controller design that involves on-line optimization calculations. The online optimization problem takes account of system dynamics, constraints and control objectives. Conventional model predictive control requires the solution of an open-loop optimal control problem, in which the decision variable is a sequence of control actions, at each sample time. Current control action is set equal to the first term of the optimal control sequence.
Model predictive control has a rich and unusual history. The main reason for the wide-scale adoption by industry of model predictive control is its ability to handle hard constraints on controls and states that arise in most applications. These constraints are particularly important in the petro-chemical industry where optimization of set points results in steady-state operation on, or close to, the boundary of the set of permissible states. Model predictive control is one of very few methods available for handling hard constraints, and it is precisely this fact that makes it so useful for the control engineer, particularly in the process industries where plants being controlled are sufficiently `slow' to permit its implementation.
Robust Model Predictive Control
Since uncertainty often has a significant effect on stability and performance. Robust model predictive control requires, in principle, on-line solution of a min-max optimal control problem in which the decision variable is a sequence of control laws , that provides the feedback necessary for robustness, and the adversary is uncertainty. Naive inclusion of feedback leads to a dynamic programming problem of overwhelming complexity. The real challenge is to devise a method, the complexity of which is considerably less than that of dynamic programming, for achieving feedback model predictive control of constrained dynamic systems that is robust to a wide class of uncertainties.
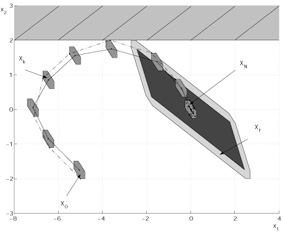
In order to overcome existing limitations of robust model predictive control, in our approach the predicted trajectory is replaced by a predicted tube in state space; the control policy (sequence of control laws) is linear in the tube, and the tube and the policy are chosen so that all realizations of the state lie within the tube. State and control constraints are easily handled.
The online optimal control problem requires is more complex than that for conventional model predictive control but the increase in complexity is relatively modest, permitting employment of this strategy in situations where robustness is required.